My name's Tawny, and I am one of the ASU undergraduate student workers at LROC. One of the many fun tasks I get to do is to produce Digital Elevation Models (DEM) of the lunar surface by using specialized hardware and software to extract elevation data on the Moon from stereo images. A DEM is like a digital version of an old-fashioned contour map and essentially provides the elevation of the surface for each pixel. For a pair of images to be stereo, it must show the same location on the Moon taken with different illumination conditions. Or, to put it another way, the relative angles of the Sun, the lunar surface, and the spacecraft have to be different for each picture while showing the same region.
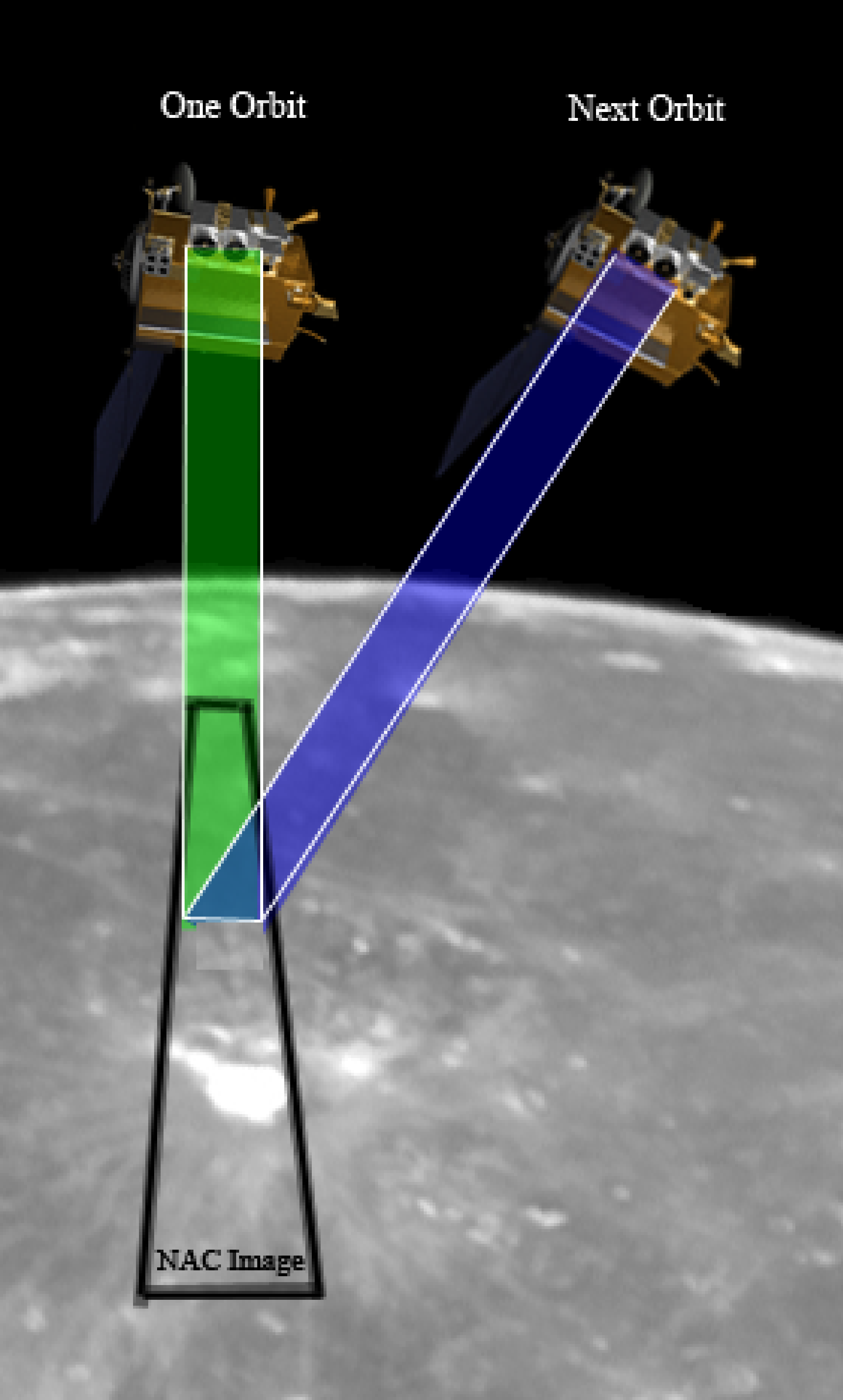
Aboard LRO are two narrow-angle cameras (NACs). Both of the NAC cameras are fixed to the spacecraft, so they can't be moved independently. The only way for LROC to get a geometric stereo pair is to first collect an image looking straight down, and then on the next orbit, have the spacecraft tilt slightly so that the cameras point toward the same location imaged on the previous orbit. This gives us a geometric stereo pair, which consists of one image looking straight down and the other image looking from an angle. The diagram below demonstrates this technique. The off-nadir rolls interfere with the data collection of the other instruments, so LRO’s opportunities to do rolls like this are limited to only a handful of rolls per week, and the number of geometric stereo images collected by LROC will be limited.
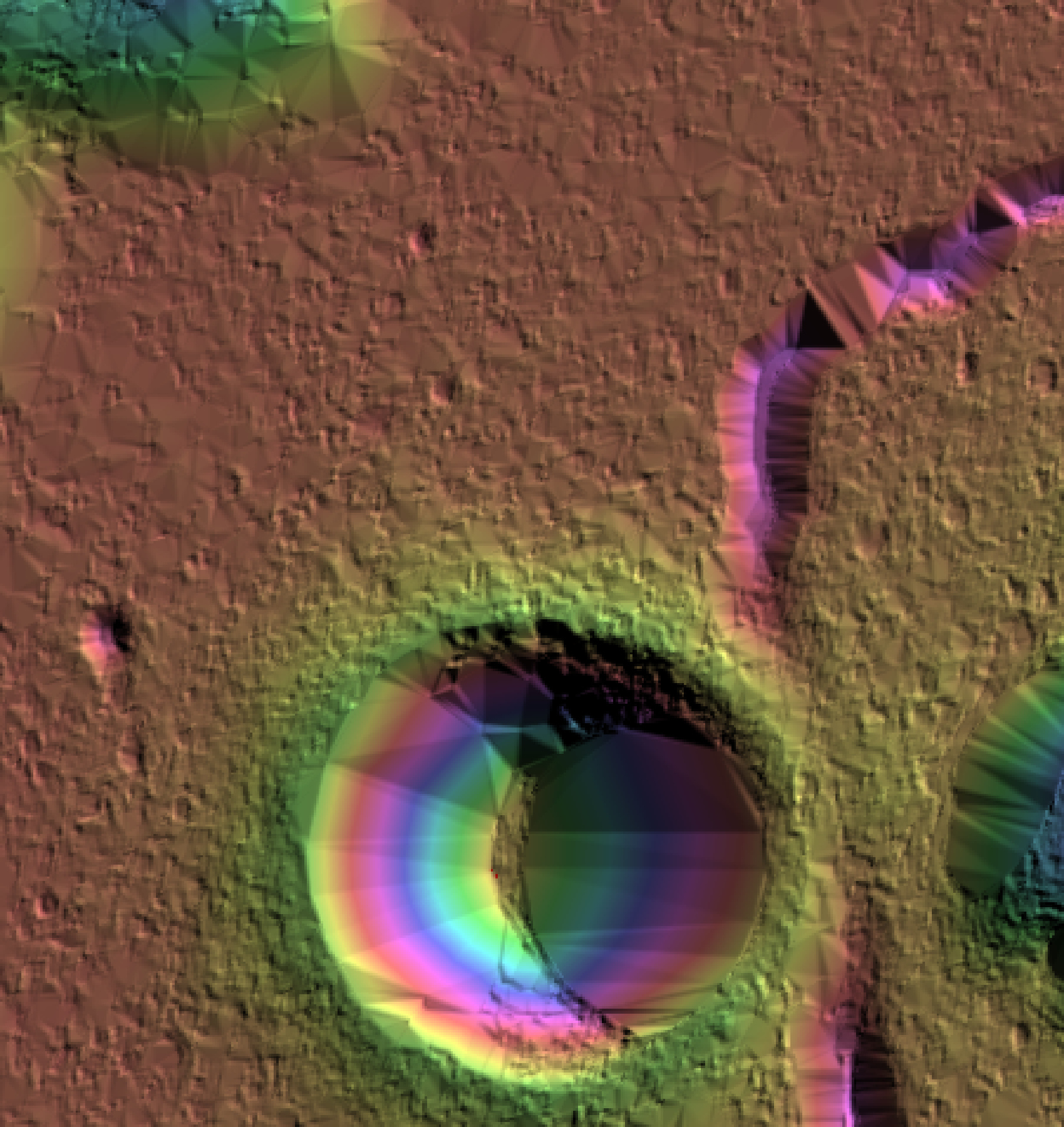
Once the stereo image pair is downlinked from LRO and processed, I use the SOCET SET software to extract 3D information. SOCET SET is a very specialized stereo-photogrammetric software suite. I give the program the stereo pair images, the NAC camera model, and spacecraft information such as the location of the spacecraft, the altitude, and the angle it’s turning. The program will then run a triangulation process, where it relates the image space to ground space. Before I run triangulation, I have to select several common points, telling the software where to find the same features in both images. If the program knows the angle from a known location (i.e. the spacecraft) to an arbitrary point on the moon for both images, then it can solve for the elevation. There’s a lot of trial-and-error in this process, and it takes quite some time to do it right. Once the program finishes triangulation with a low RMS error, I can then go ahead and extract the DEM. All of the hard work is worth it, because lunar scientists can use DEMs to provide such important information as “How steep is that mountain?” or ”How deep is that crater?” DEMs can also be used to create shaded relief maps and physical models of the lunar surface. DEMs are therefore incredibly useful as a tool to help scientists analyze the surface and terrain of the Moon to address important scientific questions and investigate potential sites for future human lunar exploration.
Currently, we are still calibrating the LROC instruments, so we are working on a preliminary version of the camera model to start using for SOCET SET analysis. Once that’s up and working, we will be able to make DEMs out of stereo pairs that we collect with the NAC cameras.
Published by Tawny Tran on 25 August 2009